- [블로그] 전자과 공대생 블로그(전자회로)
- [블로그] 전자과 공대생(전자기학)
- [블로그] 공돌이의수학정리노트
- [블로그] 배고픈 대학원생 (RF 아날로그)
- [블로그] 나라발전 교수님 (아날로그)
- [블로그] 전자과 숩달씨 ( 아날로그 회로 Razavi…
- [블로그] 회로 설계
- [블로그] 거북이 블로그_전자기학&안테나공학
- [VOD] IDEC 아날로그회로 - 고형호 교수님 (충…
- [VOD] IDEC 아날로그회로2
- [VOD] IDEC 아날로그회로3 - 이강윤 교수님(성…
- [VOD] IDEC 아날로그회로 직관적해석 - 심재윤 …
- [VOD] IDEC 아날로그 LNA - 고형호 교수님 …
- [VOD] IDEC 아날로그집적회로 실습
- [VOD] Cadence OPAMP Verificati…
- [VOD] IDEC Full-Custom Flow 교육…
- [VOD] IDEC RF System-유형준 교수님(K…
- [VOD] IDEC 디지털 Cell-based 설계
- [VOD] IDEC PLL
- [VOD] IDEC CentOS 7 (Linux)
- [VOD] Band Gap Reference 정리
- [강의] 회로설계 멘토 삼코치
- [강의] OpAmp > CMFB
- [강의] 변박사님 : OpAmp, Radar
- [강의] PMIC - 박병하 교수님 (유료)
- [강의] 삼코치 -아날로그 회설 직무 (유료)
- [강의] Radio Design 101 - Mixer
합법적사기꾼지망생
제어공학Ch06 : (Design) Root Locus(Loci)_01 : Open Loop Pole과 Zero 본문
제어공학Ch06 : (Design) Root Locus(Loci)_01 : Open Loop Pole과 Zero
평범한 민석이 2022. 10. 19. 22:08학습 목표
1. 제어공학의 핵심은 다음과 같다.
Modeling > Analysis > Design
이번에 배우는 내용은 처음으로 Design에 대해서 다룰 것이다.
우리는 이제 K(Gain)이라는 상수를 어떻게 설정해야 CL System Cotroller의 안전성, SteadyState Error 등등의 관점에서 유리한지 알아볼 것이다.
2. Root Locus(Loci.복수형) : (K에 따라 달라지는) Pole의 자취 그리기
용어정리)
Open Loop Gain(OL Gain)은 G(s)H(s)를 의미한다.
Closed Loop (System Controller)Gain은 G(s)/[1+G(s)H(s)]를 의미한다.
3. 이번 내용에서는 Closed Loop Controller System에 대해서 다룰 것이다.
내용
1. Closed Loop System Gain의 Pole vs G(s)H(s)(=Open Loop Gain)의 Pole
(1) CL System Gain의 Pole
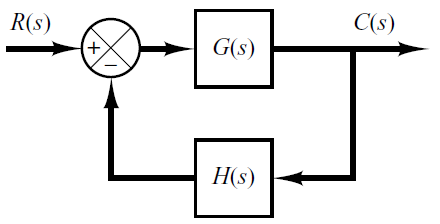
CL System의 Gain은 다음과 같다.

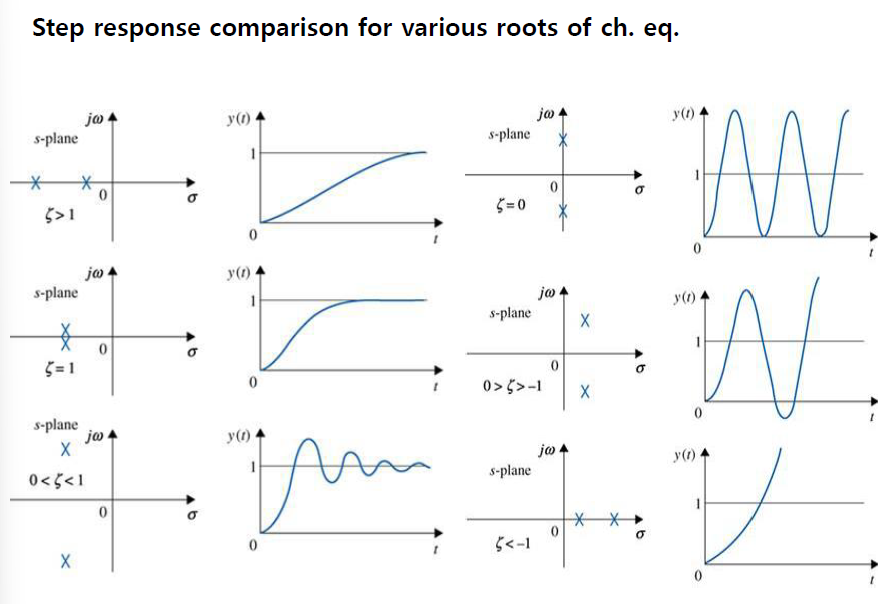
그리고 챕터 5에서 배웠듯이 Gain의 pole들의 위치가 System의 Stability, Oscilation 등을 정하는 것을 알 수 있다.
(2) G(s)H(s)(=OL Gain)의 Pole
- 그러므로 pole들을 결저짔는 R(s)가 가장 중요하므로 이를 delta s로 다시 정의내려서 다음과 같이 정리해보자

- 이때 G1과 H1은 계수가 1인 분수식(Rational Function)이다. 즉, K라는 계수를 통해서 모든 계수를 앞으로 끄집어 낸 것이다. 이를 좀 더 자세히 적으면 아래와 같다.

이때 (-p1)~ (-pn)이 바로 G(s)H(s)의 Pole들이다.
*참고로 K는 negative feedback(부조화 시스템)에서는 양수이다.

2. Root Locus(RL, Root Loci) 란?
(1) Root Locus란?
여기서 우리는 궁금증이 들었다. 만약 식2-1에서 K라는 계수가 바뀌어버리면 System Gain Pole의 위치는 어떻게 될까?
K가 바뀐다. -> CL System Gain Pole이 바뀐다. 그러면 K값이 변함에 따라서 Pole들의 위치를 S-plane 상에서 표현할 수 있지 않을까?????

즉 변하는 K에 따른 위 방정식의 자취를 Design하는데 좋지 않을까하는 것이 우리의 학습 목표이다.(Chapter5내용을 참고하자면 Stability등등을 판별하는데 좋지 않을까하는 것이다.)
이런 흐미 세상에 망할 것 ! 이것이 바로 Root Locus(RL, Root Loci)이다.!!!!
그런데 이걸 과연 어떻게 그려야할까?
이를 위해서 우선 Root Locus를 그릴때 K, OL Gain's pole의 특징에 대해서 좀 알아볼 필요가 있다.
(2) Root Locus(=K에 따른 System Gain의 Pole의 자취)와 G(s)H(s)의 Pole의 관계
결론부터 이야기하면 G(s)H(s)의 Pole을 알면 근궤적(Root Locus)를 그릴 수 있다.
그리고 당연하게도 CL System Gain의 Pole이 결국에는 G(s)H(s) (= KG1(s)H1(s))에 의해서 정해질 것이다.
아래에서 자세히 설명하겠지만 아마 " G(s)H(s)의 Pole들을 알면 K에 따라 변하는 CL System Gain의 Pole의 자취(RL)를 알 수 있지 않을까?"라는 생각을 했다고한다.
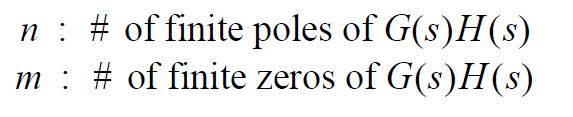
(3) Root Locus 원리 1: |K|가 점점 커짐에따라 CL System Gain의 Poles는 Poles에서 Zeros로 이동한다.
원리를 간단하게나마 설명하자면 다음과 같다.

위식을 살펴보자
만약 |K|=0이면 (위의 항등식을 만족시키기 위해서) G1H1의 s는 G1H1의 pole 위치에 있을 것이고, |K|=infinite라면 G1H1의 s는 G1H1의 Zero일 것이다. (그래야 0=0, infinite=infinite를 만족시키기 때문이다.)
즉 |K|가 0에서 점점 inifinite로 커질때 s의 자취는 Pole에서 Zero로 이동함을 알 수 있따.
(4) Root Locus 원리 2 : Open Loop의 각도조건과 크기조건
- 위의 식을 복소수의 크기와 각도 관점에서 바라보자. 당연히 아래와 같이 '크기조건'과 '각도 조건'으로 나뉠것이다. (K는 실수이므로 각도는 (180도*자연수)에 해당한다.)
- 우선 당연히 G1H1의 크기는 |-1/K|에 해당될 것이고
- 각도는 -1/K가 양수(K<0)냐 음수(K>0)냐에 따라 각각 180도 혹은 0도가 될 것이다. 이를 식으로 적으면 아래와 같다.





- (그리고 아래에 대한 자세한 설명은 나도 몰라서 잘 못하겠는데) G(s)H(s) 크기와 각도를 구하는 식은 다음과 같다고 한다..


우선 여기까지만 하고 자세한 RL(근궤적)그리기는 다음 내용으로 다루자
'Modern Control Engineering' 카테고리의 다른 글
| **제어공학Ch03 : (Analysis) Op-Amp Controller (0) | 2022.10.23 |
|---|---|
| 제어공학Ch06 : (Design) Root Locus(Loci)_Example01 (0) | 2022.10.20 |
| ***제어공학Ch06 : (Design) Root Locus(Loci)_02: 근궤적 그리기 방법 (0) | 2022.10.20 |
| 제어공학+alpah : Rational Function, SPR, Residue(전기회로2) (0) | 2022.10.19 |
| **제어공학Ch05 : (Analysis) Stability 판별법(전달함수) 총정리 (0) | 2022.10.10 |



